자율협력주행 화물이송장비
개요
- 담당기관 :

- 항만 내부에서 다른 장비 및 시스템과 연계하여 컨테이너 화물을 무인 자율로 운반하는 야드 트럭(Yard Truck, YT)
* 야드 트럭이란?: 컨테이너 장치장(Yard)과 컨테이너선이 정박된 선석을 오가며 항만 내에서만 화물을 이송하는 특수 차량

- 항목
- 신차
- 규격 (전장*전폭*전고)
- 5,825*2,875*3,125
- 휠베이스
- 3,200
- 승차인원
- 1
- 최고속도(비적재시/적재시)
- 14m/s이상 / 7m/s 이상
- 1회 충전 주행거리
- 150km 이상
- 서스펜션
- FRONT:LEAF SPRING
REAR : AIR SPRING
- 브레이크
- FRT&RR AIR BRAKE
- 구동모터최대출력
- 200kW
- 타이어
- 12R22.5
- 충전 형식
- DC COMBO 2
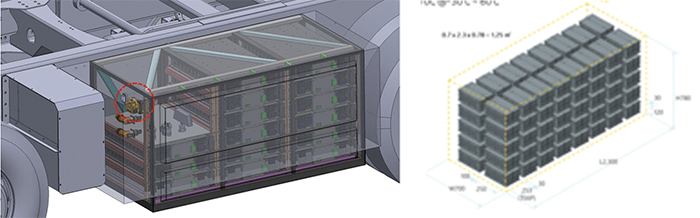
- 배터리종류
- LTO
- 배터리 용량
- 160kWh


특장점
- 전기 배터리
-
- 5℃ ~ 50℃의 환경에서도 방전되거나 충전 성능 저하가 없는 전기 배터리
- nm급 LTO를 사용함으로써 3차원 적인 리튬의 이동 경로를 통해 20분 급속 완충이 가능하고 한 번의 완충으로 150km 이상 운행
- 산화물로 구성되어 있어 폭발 등의 위험에서 안전성이 크게 높음
- 짧은 시간 안에 큰 출력을 내야 하는 산업에 적합한 전기 배터리
- 수명 사이클은 보통 3,000~10,000사이클로 리튬배터리 대비 약 3배 이상 많은 충·방전 횟수를 가지고 있어 내구연한이 길고 유지관리가 용이
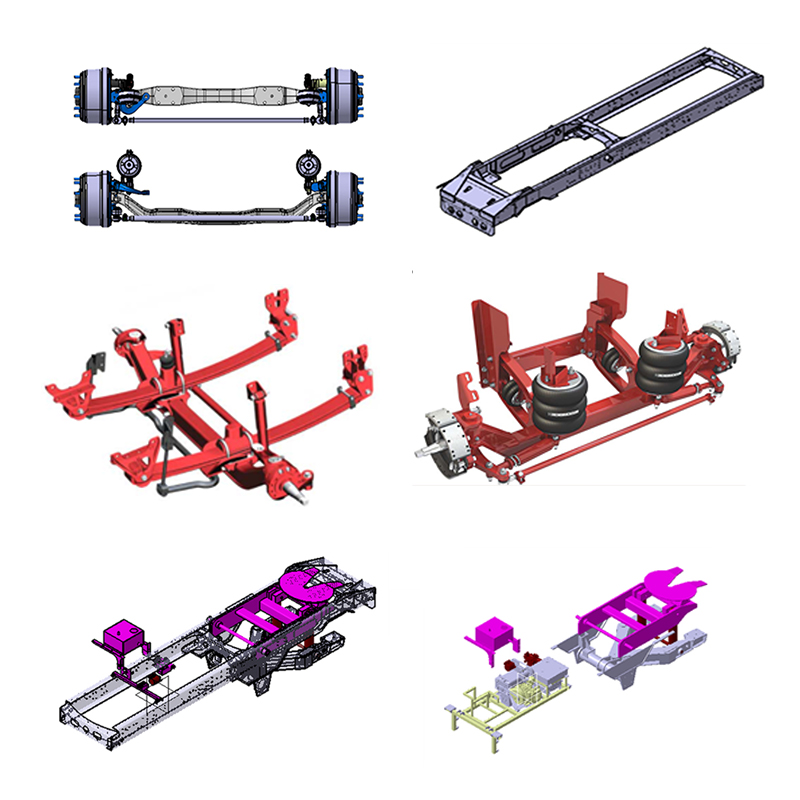
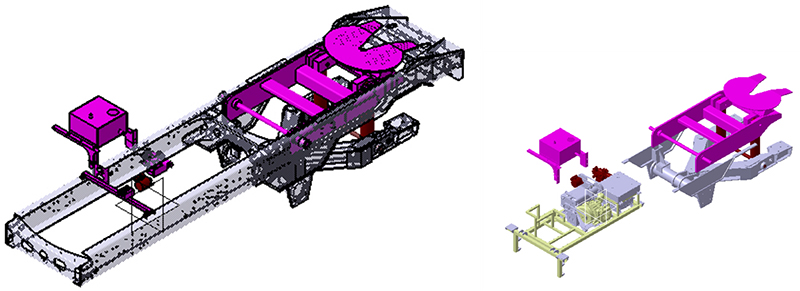
- 경량화 샤시
-
- CAYT를 받치는 샤시는 이중 구조에서 고강도 철재의 단일구조로 변경하여 25% 경량화
- BMS(Battery Management System)
-
- 신호수집, 절연저항 검출, 배터리 상태 추정, 충전 관리, 전력 예측, 고장 진단 기능을 통해 고전압 전기 배터리를 안정적으로 관리
- 안정적 드라이빙
-
- 충격을 완화하는 에어 스프링과 항만 맞춤형 구동제어기는 항만 내 비균질 노면에서도 안정적인 드라이빙을 구현
Release note
자율협력주행 센서융합 및 제어시스템
개요
- 담당기관 :
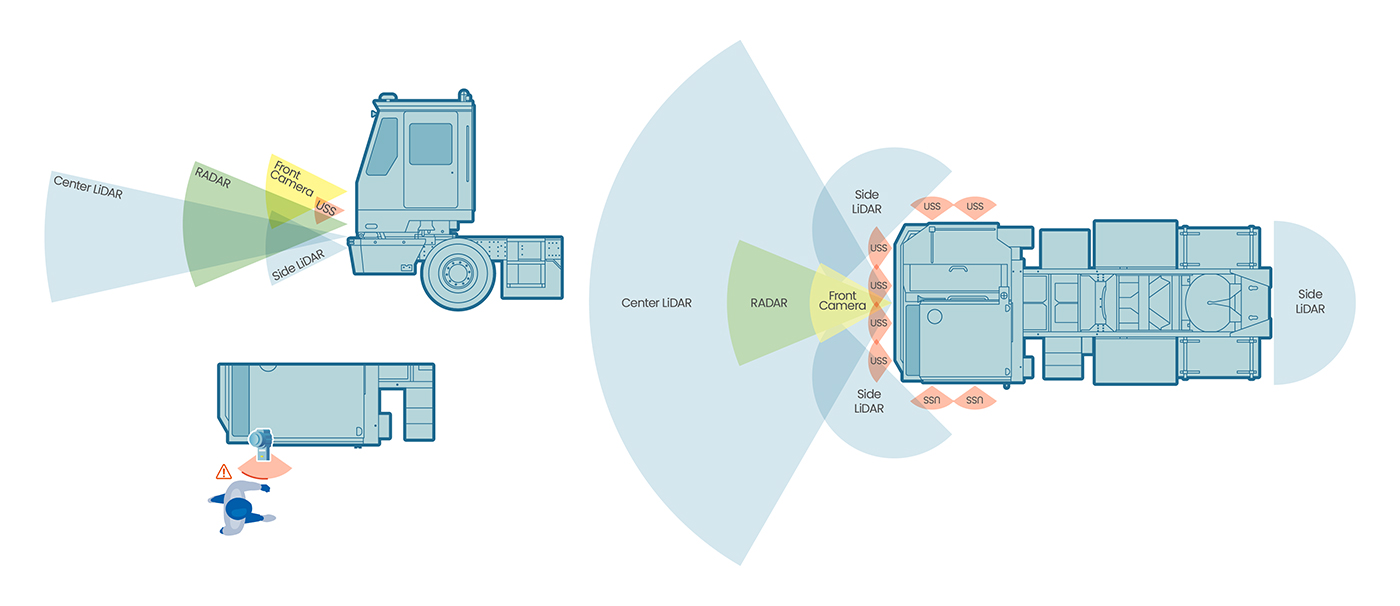
- 주변 사물을 인식하고 운행 안정성을 확보 하기 위한 센서 시스템 구축 및 인지 판단 제어 기술

- LiDAR
- 고해상도 3D 디지털 라이다를 이용하여 물체까지 거리 등을 측정하고 물체 형상을 데이터화
- 64 CH
- Range : 50~200
- FOV : 180deg / Vertical : 45deg
- IP69, IP69K
- Front Camera
- 고성능 전방 장애물 인지(차량,보행자, 인프라 등) 및 차선 인지 보조
- FOV : 60deg(수평)
- FFrame Rate : 60FPS
- FPixels : 1920 x 1080

- AGX Orin 64GB
- 자율주행 인지/제어 임베디드 시스템
- CPU : 12‑core Arm® Cortex®‑A78AE
- GPU : 2048‑core Ampere, with 64 Tensor

- RADAR
- 자동차 단거리 레이더 시스템을 이용한 전방 40개의 오브젝트 상세속성 정보 활용
- Vertical FOV : 45deg
- Range : 60-150 m
- Frequency Band : 76-77GHz

- GPS
- GPS 위성에서 보내는 신호를 수신해 CAYT의 정밀 측위( GNSS INS )
- Horizontal Position Accuracy : Standalon/SBAS/DGPS : 1.2/0.6/0.4 m
- RTK-INS : 0.6cm + 0.5ppm
- Heading Accuracy (Dual Antenna) : 0.3deg/1.5deg (w/o RTK, w/ RTK

- Industrial PC (NUVO-9160GC)
- 자율주행 시스템의 인지/판단/제어 연산을 위한 GPU 컴퓨팅 Edge AI 플랫폼 (RTX-3050 8GB 포함)
- MLS-STD-810G
- Vibration Prevention Kit
- Pixels : HDMI(HD)
- -25°C~60°C, 1Grms 진동 흡수
- USS
- 주행안정성 및 정차 시 주행거리 확보를 위한 차량 기준 근거리에 위치한 오브젝트 디텍션
- 12 Sensor 1 ECU
- Range 0.15 – 5.5 m
- Frequency Band : 43~60 Hz

- AVM (Around View Monitor)
- 차량 전후좌우에 장착된 카메라의 영상을 이용해 정확한 차선 인지를 위한 시스템
- FOV : 360deg
- Frame Rate : 30FPS
- Pixels : HDMI(HD)
특장점
- 대형 차량용 AVM
-
- 대형 차량용 AVM 센서 캘리브레션으로 정지선, 주차선, 주행차선을 정확하게 인식

- HD MAP 기반의 자율주행 시스템 운영
-
- 고정밀 GPS를 이용하여 차량의 위치를 지속적으로 표시(트레킹)
- 항만 내 GPS 음영지역에서도 고성능 센서로부터 수집된 데이터를 HD MAP 정보와 매치 · 분석하고 위치정보 보정 알고리즘을 활용하여 현 위치를 보다 정밀하게 표시

- 다수의 센서 융합 시스템을 구축하여 안전성 향상
-
- 화물이송장비의 주행 중 발생할 수 있는 사고를 방지하고 안전성을 확보하기 위해 복잡한 야드 구간에서 사각지대를 최소한 센서 시스템 및 인식 기술 구축
Release note
자율협력주행 차량 제어 알고리즘
개요
- 담당기관 :

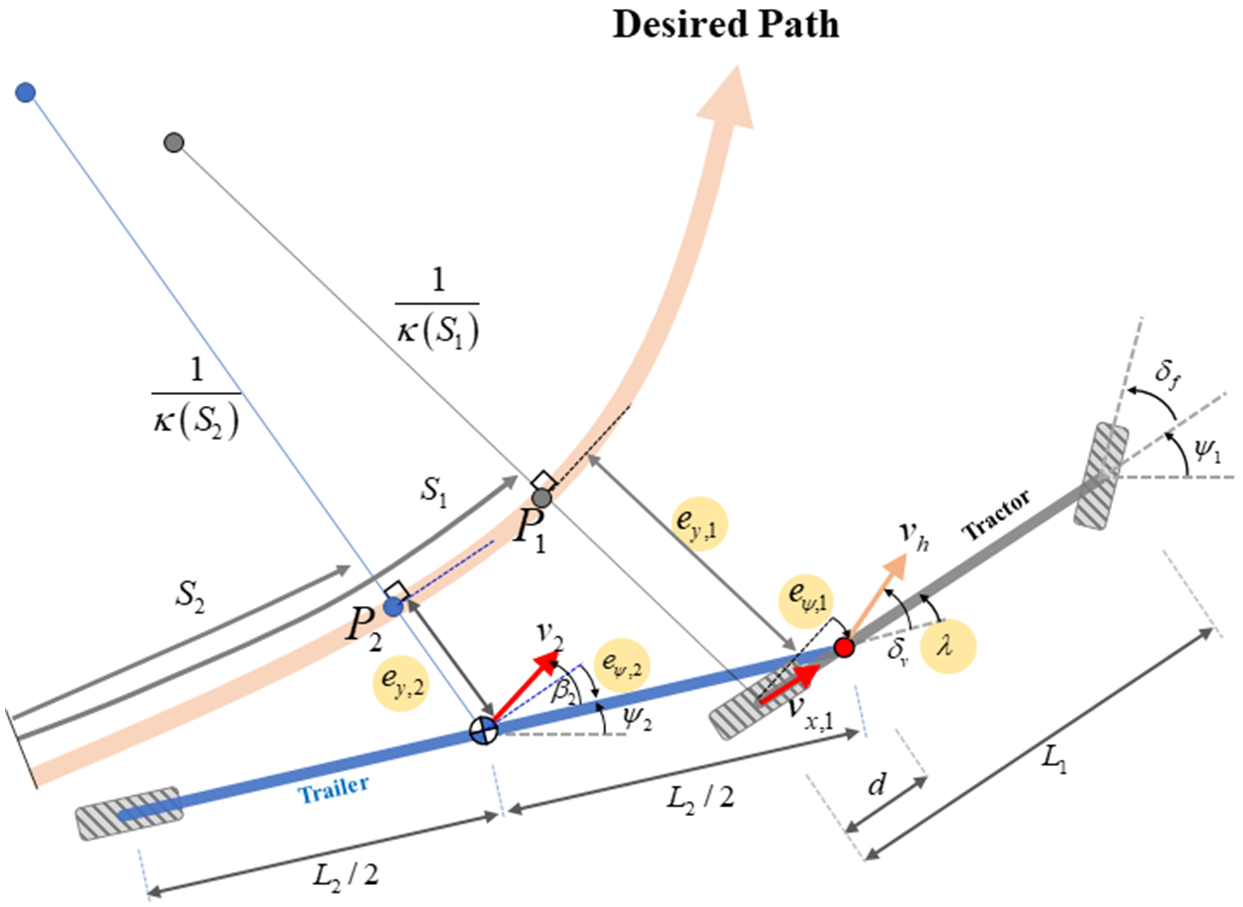
- 항만 내 정밀 주행을 위해 야드 트럭의 동적 특성을 반영한 제어 알고리즘 개발
- '센서 시스템'과 'V2X 인프라'를 통해 수집된 정보를 분석하여 차량에 제어 명령 전달
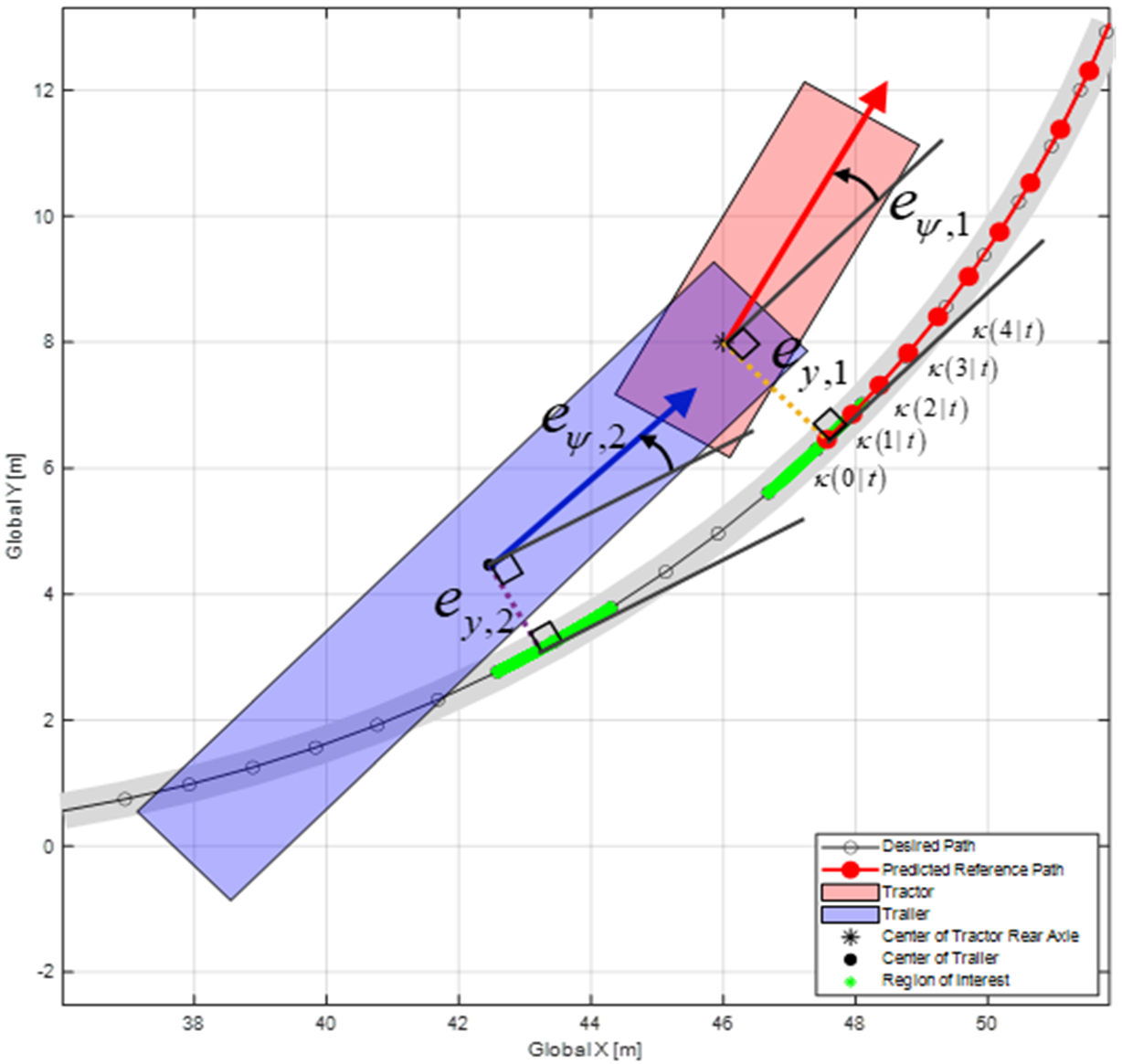
- 항만 내 주행 특성 고려한 판단 및 제어 알고리즘
-
- 항만 작업 경로 상 곡률 반경, 트레일러의 거동에 의한 회전 영역 등을 고려한 항만 최적화 주행 제어 알고리즘
- 항만 작업 시 발생하는 작업 차선 진입·진출 및 도로 위 주정차 차량 등 장애물에 대응할 수 있는 주행 판단 알고리즘

- 인프라 연계 주행 알고리즘
-
- 인프라 연계를 통한 목적지 및 경유지 반영 경로 생성 및 작업 위치 도달 알고리즘
- 인프라 (CPS) 연계를 통한 작업 위치 정밀 정차 알고리즘


특장점
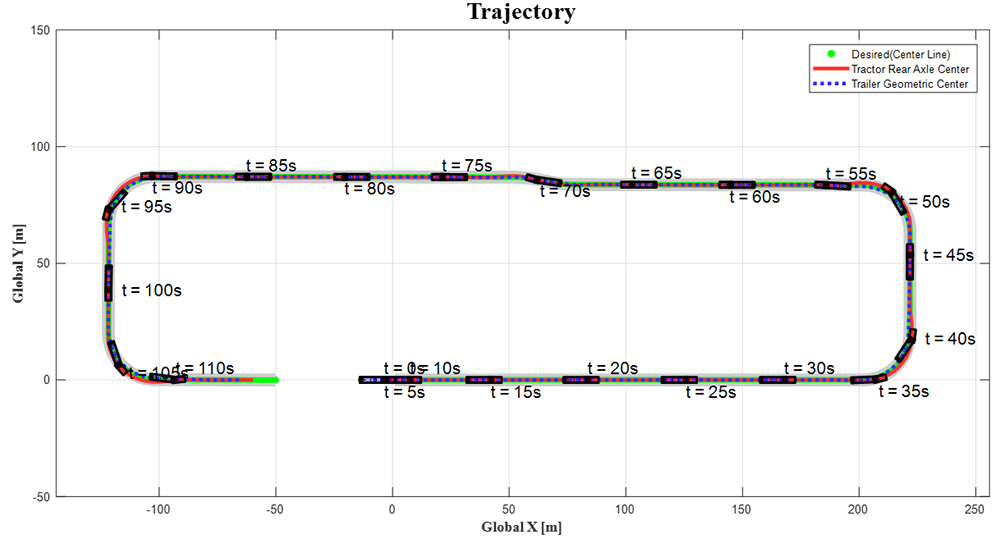
- 01야드 트럭-트레일러의 정확하고 안전한 경로 추종
-
- 화물이송장비의 횡오차 · 각오차 · 히치각 등 동적 특성을 고려한 트럭-트레일러 모델을 개발하여 차선 내 정확한 경로 추종
- 야드 트럭 특성이 반영된 모델을 사용한 경로 추종 알고리즘을 시뮬레이션으로 검증 완료
- 02작업 및 주행 상황에 맞는 제어 알고리즘
-
- '차로 유지, 차선 변경, 편향 주행, 교차로 통과와 같은 주행 상황' 및 '목표 위치에 정확한 정차' 등 항만의 특성을 고려한 제어 알고리즘 개발
- 일반 자율주행차량에 적용하여 검증된 알고리즘을 항만에 도입함으로써 안정성 확보
- 03전방/전측방/후측방 인지 처리(레이다, 라이다, 카메라) 알고리즘
-
- 화물이송차량의 센서 시스템 및 스마트CCTV를 통해 들어오는 정보들을 인지 · 처리하기 위한 알고리즘이 정지 · 고정 장애물, 보행자, 이동 중인 장비 등을 정확하게 인지하여 회피 명령 등 지시 전달
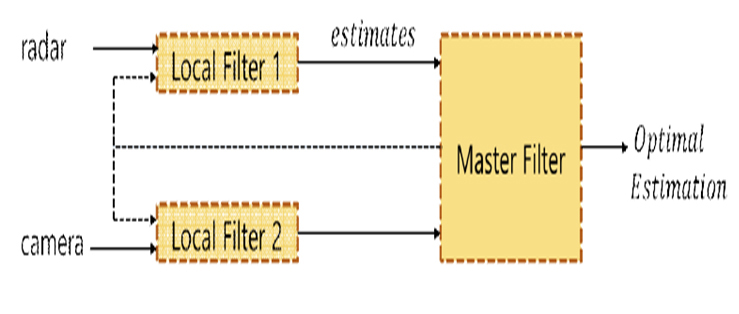
카메라-레이다 융합인지 알고리즘 개념도

카메라-레이다 이지 객체 인식을 통한 라이다 인지 객체 보정 알고리즘 작동 화면
Release note
스마트 항만 디지털 인프라
개요
- 담당기관 :

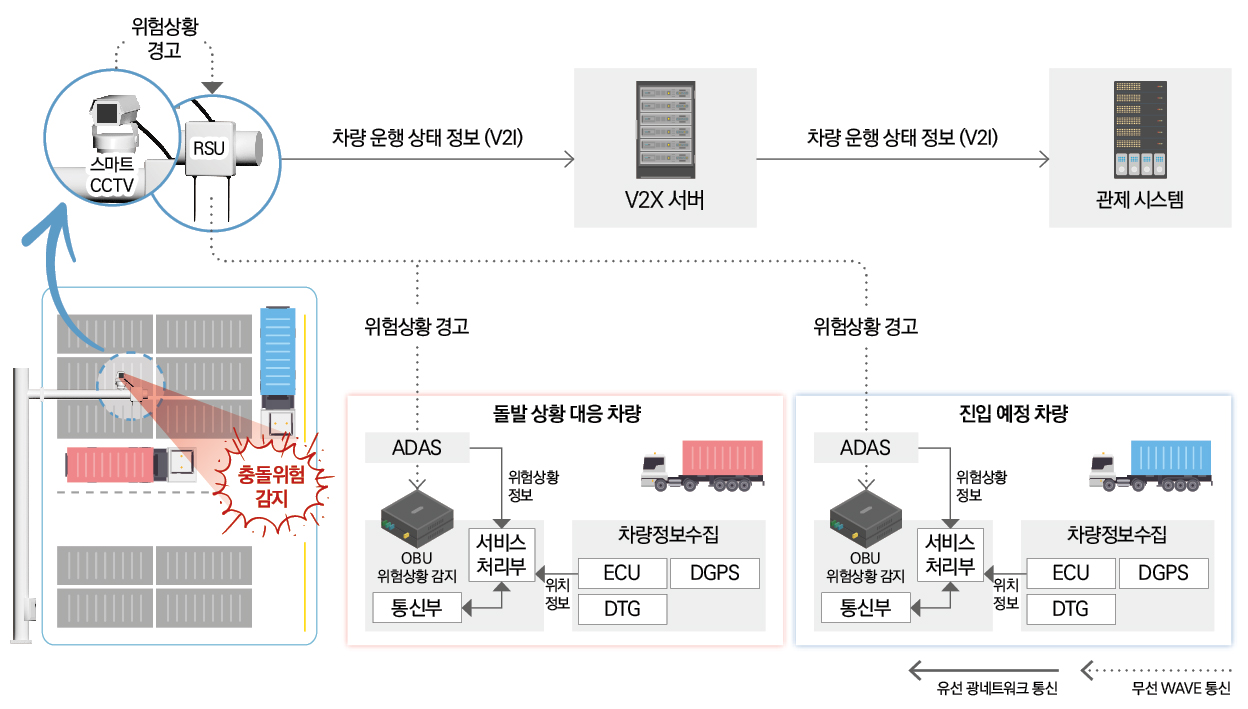
- 화물이송장비의 안전한 운행 지원을 위한 디지털 인프라 (차량사물통신(V2X), 스마트 CCTV 등)
- 자율주행 전용 네트워크 : WAVE 기반 V2X 기술을 중점으로 설계
- 딥러닝 기반의 영상분석 기술로 교차로의 다양한 정보를 수집 및 분석하여 현장시스템에 제공

- PVD
- 프로브 차량데이터
- TIM
- 여행자 정보 메시지
- RTCM
- 정밀측위 보정 메시지
- BSM
- 기본 안전 메시지
- RSA
- 도로위협경고 메시지
- MAP
- 지도데이터메시지
- 노변기지국 (RSU)
-
- 교차로에 고정된 위치에 있는 장치로, CAYT의 OBU와 V2X 서버를 연결해주는 통신 중계기
- OBU를 통해 차량 정보를 받으면 V2X 서버를 통해 필요한 서비스에 맞게 데이터 가공 후 주변 다른 차량으로 전송

- 차량단말기 (OBU)
-
- 화물이송차량에 설치되는 자율주행 통신장비
- 차량의 속도, 위치정보, 방향과 같은 차량정보 데이터를 차량↔차량, 차량↔노변기지국(RSU) 간 통신 수행
- WAVE 통신표준을 통해 차량 및 RSU와 통신

- V2X 서버
-
- 노변기지국(RSU) 및 스마트 CCTV에서 전달된 정보를 저장하여 관제시스템에 전달하거나 정보 교환 시 인터페이스 역할
- V2X인프라 구간의 중심 기능서버로 V2X 인프라 구간의 모든 정보 및 활동을 관리
- 관제시스템의 각종 지시 메시지를 수령하여 V2X 메시지로 변환 후 노변기지국(RSU)로 전달하고, CAYT의 정보를 관제시스템에 전달하는 매개역할 수행

- 스마트 CCTV
-
- AI기반 알고리즘을 적용하여 주변의 실시간 교통정보 및 교통사고의 정보를 수집 및 모니터링
- 상황 정보를 노변기지국(RSU)을 통해 V2X 서버로 전달
- 날씨(눈, 비), 구조물 가림, 시간변화 (낮,밤) 등의 상황에서도 객체 검지
특장점
- 01정체 상황을 식별하여 혼잡도를 완화하고 사고 방지 지원
-
- 스마트 CCTV의 인공지능을 이용한 딥러닝 기반의 객체분석을 활용해 정체 상황 정보를 관제시스템에 전송하여 혼잡도 완화
- 교차로 구간에서 충돌 가능성(차량-차량, 차량-작업자) 등 위험 상황이 발생할 경우 차량단말기(OBU)에 정보를 전달하여 사고 방지 지원
* OBU는 통신부만 관여하고 서비스 처리부는 포함되지 않으므로 서비스에는 관여하지 않음
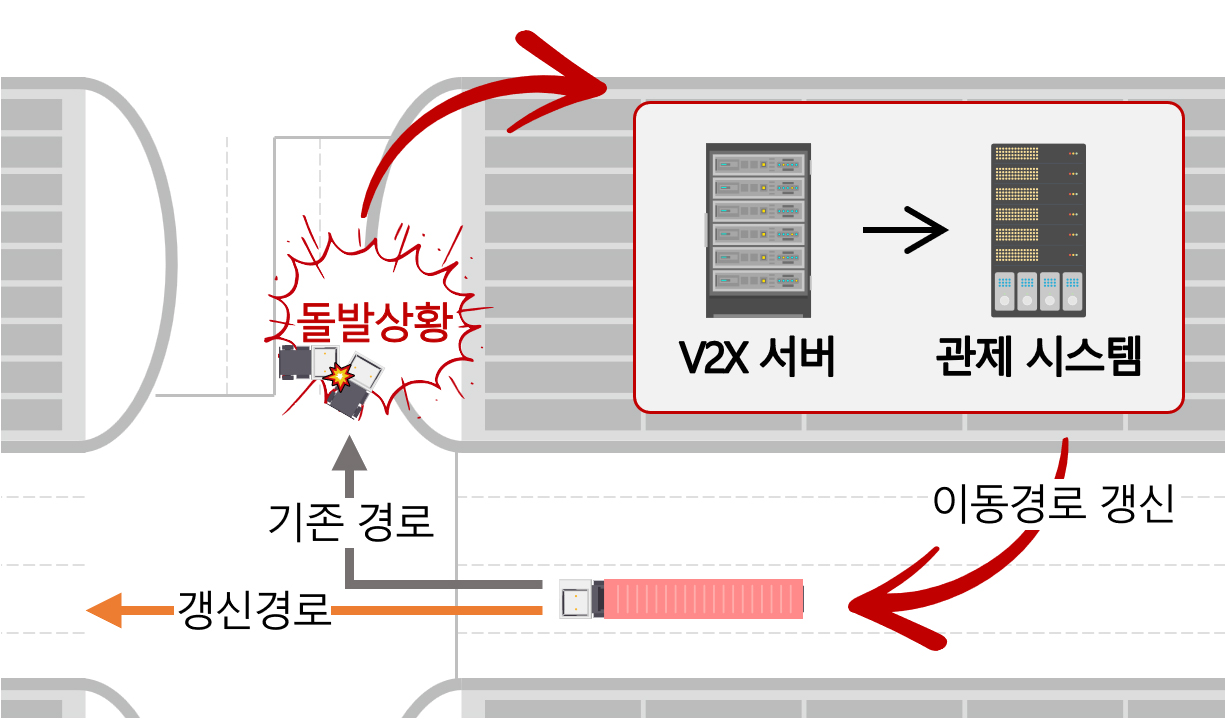
- 02경고 및 지원 서비스
-
- 사고 · 고장 · 장애물 발생과 같은 돌발상황이나 급정거 · 급감속 등의 상황 정보를 실시간으로 수집하고 주변 차량과 관제시스템에 경고메세지 전달
- 정비차량 또는 긴급차량 통행 정보를 관제시스템에 전송하고 주변 차량에게 정보를 전달하여 주행 우선권을 부여
- 항만 내 새로운 V2X 표준 메시지 셋 정의
Release note
CAYT 관제시스템
개요
- 담당기관 :

- 연관 시스템과 연계하여 '자율협력주행 화물이송장비'의 최적 운행을 지원하고 관리하는 '운영통제시스템'
(*터미널운영시스템(TOS), 통합관제 시스템, 시뮬레이션 시스템 등)

- 01 작업 실행 절차 관리
-
- 작업 우선순위를 고려한 최적 작업 순서를 설정하고 화물이송장비에 실시간으로 명령 전달
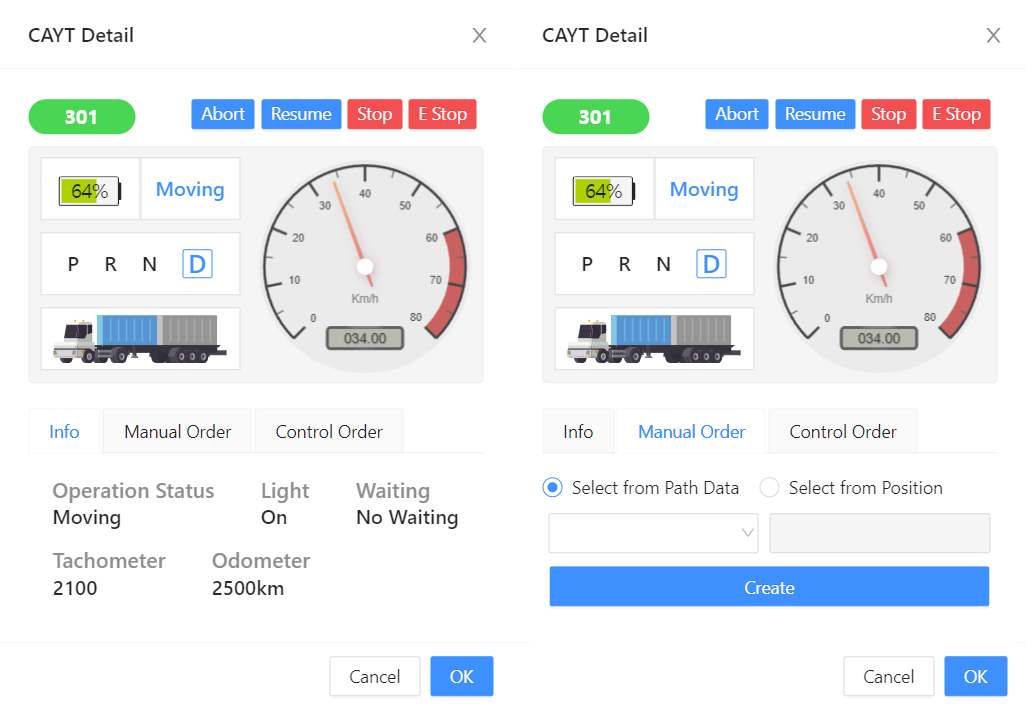
- 02 장비 상태 관리
-
- 화물이송장비의 운영 상황, 차량 상태, 잔여 배터리 등을 모니터링
- 작업 및 주행의 수동제어 기능(작업재개, 정지, 비상정지, 전진, 후진) 제공
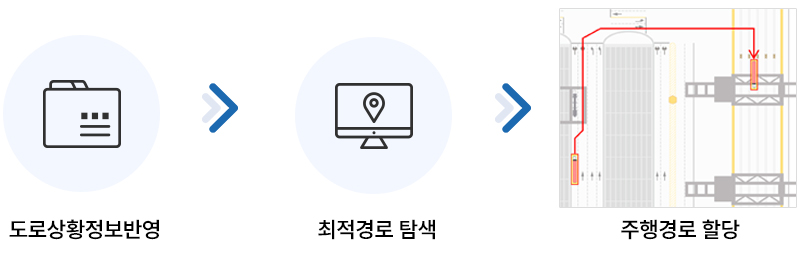
- 03 최적 주행경로 탐색
-
- 화물이송장비 위치 및 컨테이너 화물의 목적지에 따라 최적의 경로를 탐색하여 주행경로 할당
- 각종 인프라 설비 및 화물이송장비에 설치된 센서로부터 접근제한구역· 장애물 발생·교통혼잡 등의 실시간 도로상황 정보를 수신 받고 경로에 반영하여 운영 최적화
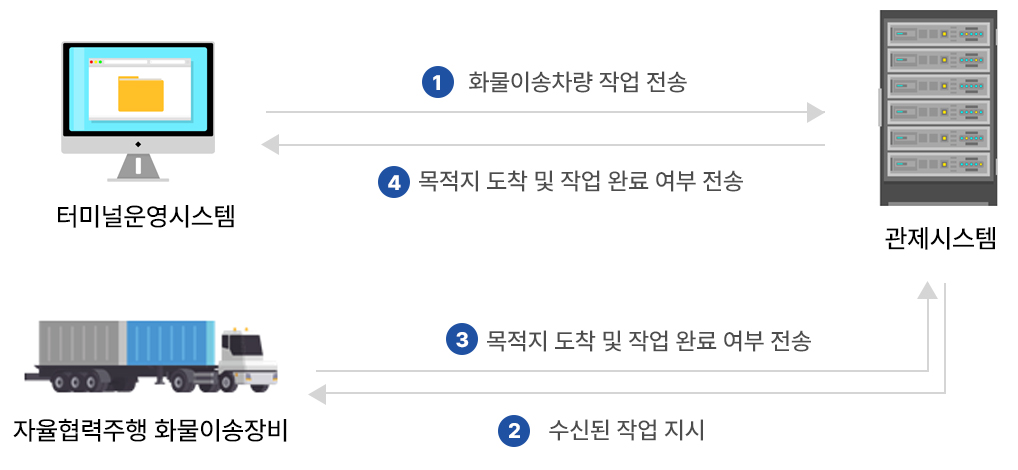
- 04 터미널운영시스템(TOS) 연계
-
- 터미널운영시스템(TOS)과 연계하여 이송 화물 작업을 관리
- 05 항만 시설(장비, 인프라 등) 연계
-
- 선석 크레인, 야드 크레인 등 대형 하역장비와 작업 연계하여 CAYT의 정위치 정차 유도 (GPS, CPS)
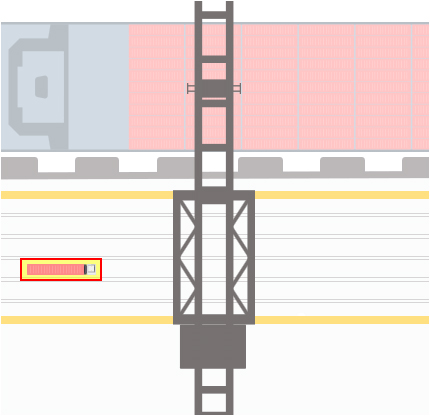
1. Bitt ID 및 Offset 기준 약 15m 전방에 도착
2. QC도착 후 QC GPS 위치 정보 기준 근접이동
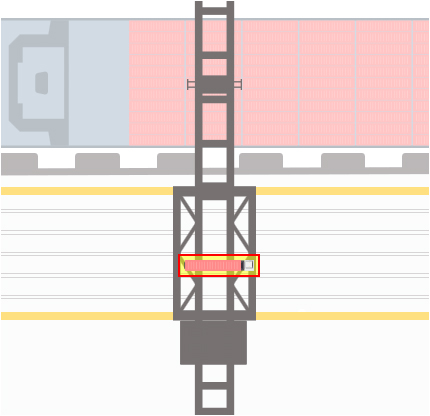
3. QC GPS 정보 기반 정위치 정차 완료 후 상하차
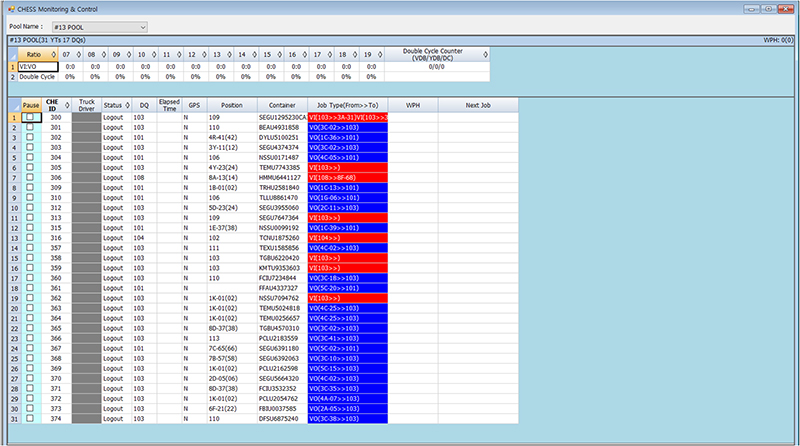
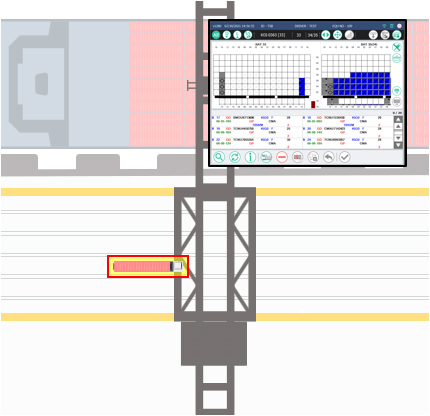
- 06 운영 모니터링 (운영통제)
-
- 100여 대 CAYT를 동시에 관제하며 실시간 위치 및 주행 경로 표시
- 위험 사항이 발생한 구역을 접근 금지나 감속 구역으로 지정하는 기능 제공

- 07관제 시스템 연계 시뮬레이션
-
- 100여 대 CAYT가 동시 운용되는 환경에서 CAYT 동작을 유사하게 모사하는 시뮬레이션 기술 개발
- 사전 성능검증에 활용

- 08 예외처리
-
- 도로 위 장애물·긴급 상황 발생 시 AI 빅데이터 분석을 통해 사각지대와 교통 흐름을 고려한 고속 의사결정 실현 (이동경로 재탐색)
특장점
- 통합 모니터링
-
- 터미널 야드 맵을 기반으로 CAYT 운행 가능 경로 및 지오펜스 영역 등 실시간 야드 상황에 대한 통합 모니터링이 가능하며, 100대 이상의 CAYT 실시간 모니터링을 제공
- TOS 연계 작업지시 및 현황 관리, 개별 차량의 실시간 위치 및 상태, Task 진행 현황 관리
- CAYT 및 작업현황에 대한 실시간 지표와 작업이력 데이터를 기반으로 KPI 조회 기능 제공
- CAYT의 실시간 위치 정보를 활용해 지시한 경로에서 일정 범위 이상 이탈 하거나, 일정 시간 정지하였을 때 이상상황을 감지하여 경고메세지 전달
- Workflow 및 작업 관리
-
- 터미널 작업형태별 Workflow 관리 기능으로 CAYT 이동 및 절차를 터미널 운영 정책에 맞게 유동적으로 관리
- 선박의 접안 현황 및 위치, 안벽구간 진입/진출 경로, Pinning Station, 대기구간 등의 정보를 터미널운영시스템과 연계하여 관리
- CAYT 운영을 위한 작업 준비, 충전 및 주차 프로세스 지원, 운영모드 관리와 예외상황에서의 수동제어 지원
- 터미널 정보 및 경로관리
-
- 시설 및 장비 변화에 용이하게 대응하고자 터미널 시설, 크레인 등의 장비 정보, 정차 위치, 충전소, 운행 경로 등의 관리 기능을 제공
- 차량 및 인프라를 통해 실시간으로 수집된 정보를 기반으로 하는 LDM을 활용하여 최적의 경로를 탐색 (혼잡구간 및 운행제한구역 고려)
- 작업 순서 및 대기 차량을 고려하여 주행차로에서 작업차로로 진입/진출 지점 결정
- 표준 인터페이스
-
- 다양한 공급사의 터미널운영시스템과 연계할 수 있도록 TIC 4.0 표준 인터페이스를 적용하여 범용적으로 적용 가능한 시스템
- 다양한 자율주행차량과 관제시스템을 연동하기 위한 표준 API 제공
- 화물 이송 효율 향상
-
- CAYT 위치와 상태, 작업 진행현황을 실시간으로 수집하고 교착 상태와 충돌 가능성을 최소화 하는 최적의 경로를 제공하여 CAYT 운영 최적화 및 효율성 향상
- 터미널운영시스템과 연계한 시뮬레이션을 통해 차량 운행정책에 따른 다양한 운영 시험 지원
- 현장 작업자를 위한 모바일 서비스
-
- 현장 순찰 중 발견한 위험 영역에 대해 운행제한구역을 등록하거나 해제하는 기능 제공
- 자동화 설비가 없어 상태 정보 연계가 불가능한 경우, 현장 작업자 스스로 주차장 및 충전소 상태 갱신 (점유여부 등)
- Pinning Station 작업자가 라싱콘 탈부착 완료 시 정보 입력
Release note