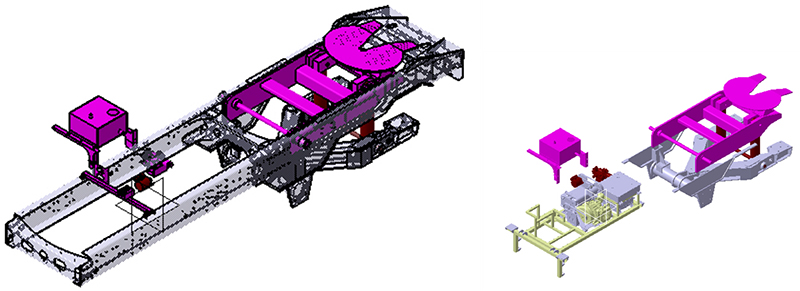
Connected Autonomous Yard Truck (CAYT)
Overview
- Responsible Institute :

- A yard truck that autonomously transports container cargo and integrates with other equipment and systems within the port.
* What is a yard truck? A special vehicle that transports cargo only within the port, between the container yard and the berth where the container ship is anchored

- Items
- New vehicle
- Size (L*W*H)
- 5,825*2,875*3,125
- Wheelbase
- 3,200
- Number of seats
- 1
- Maximum speed (unloading/loading)
- 14m/s and higher / 7m/s and higher
- Single charge distance
- 150km and higher
- Suspension
- FRONT:LEAF SPRING
REAR : AIR SPRING
- Brakes
- FRT&RR AIR BRAKE
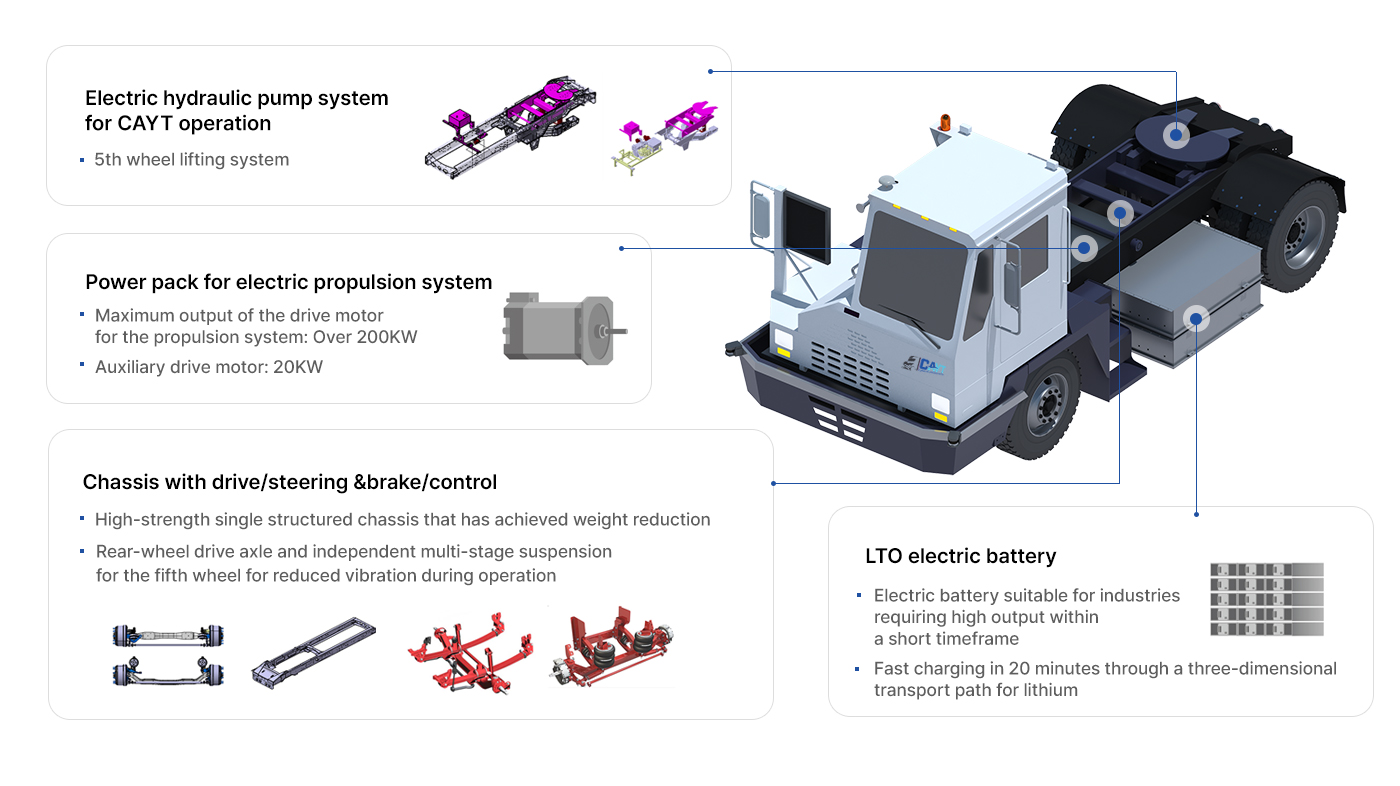
- Drive motor maximum output
- 200kW
- Tires
- 12R22.5
- Charging
- DC COMBO 2
- Battery type
- LTO
- Battery capacity
- 160kWh

Advantages & Features
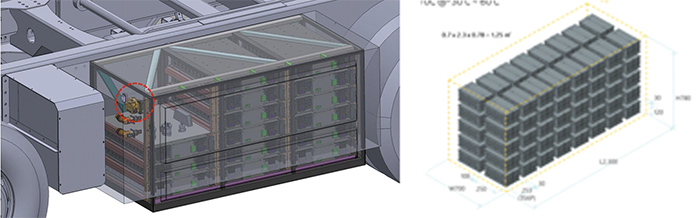
- Electric battery
-
- No performance degradation during charging and discharging in cold port environments (-5℃~50℃)
- Use of an nm-class LTO, allowing fast charging in 20 minutes through a three-dimensional transport path for lithium and a single charge distance of more than 150km
- Containing oxides,which are very safe from explosions and other hazards
- Electric battery suitable for industries requiring high output within a short timeframe
- Average life cycle of 3,000~10,000 charges, which is more than three times the number of charge/discharge cycles of lithium batteries, making it highly durable and easy to maintain
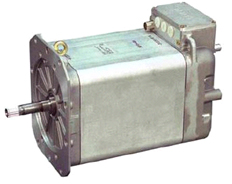
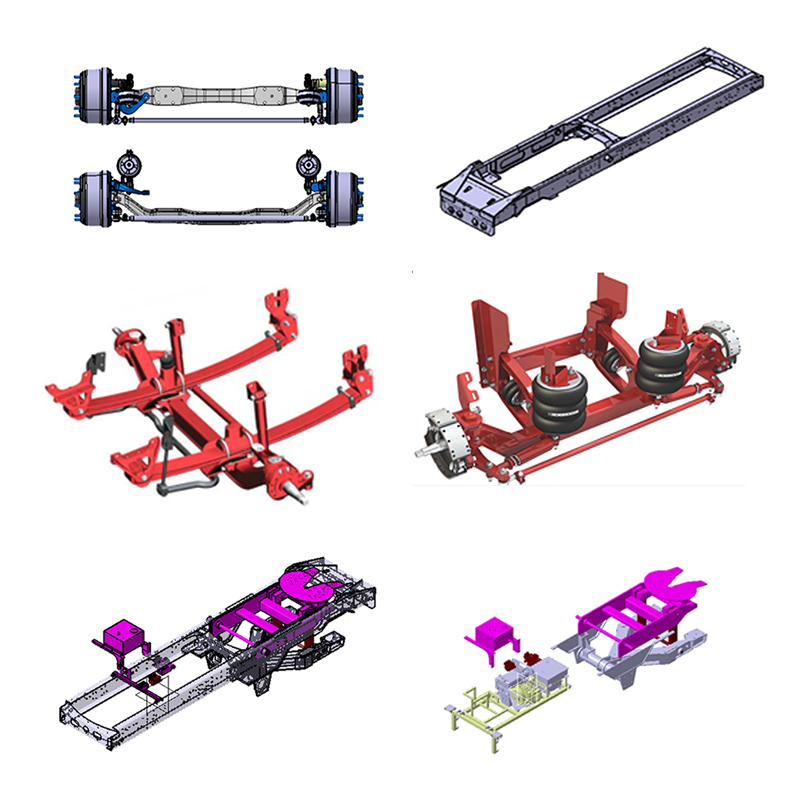
- Lightweight Chassis
-
- The dual structure has been replaced with a high-strength side structure, achieving a 25% weight reduction
- BMS(Battery Management System)
-
- Reliable management of the high voltage battery through signal collection, insulation resistance detection, battery status estimation, charging management, power prediction, and malfunction diagnosis
- Stable Driving
-
- Realization of stable driving even on the non-homogeneous roads of the port with port-specific driving controller air springsto relieve shocks
Release note
Autonomous Driving Sensor Fusion and Control System
Overview
- Responsible Institute :
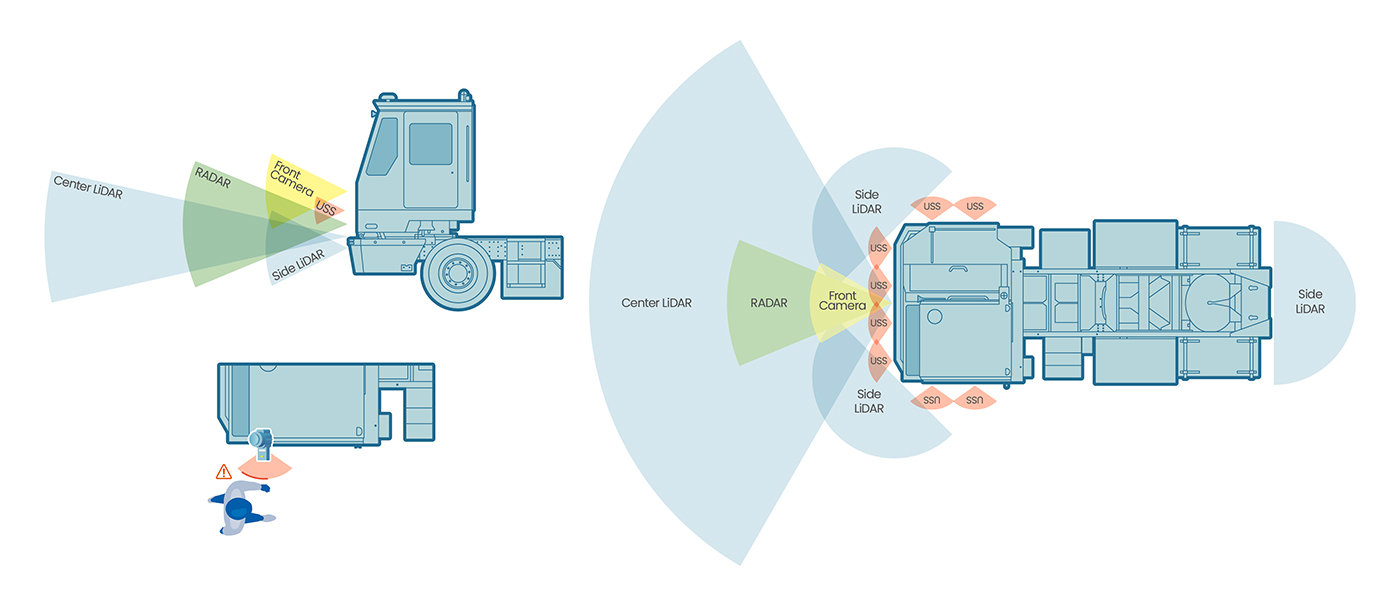
- Development of a sensor system and recognition/judgment/control technology that minimizes blind spots in complex yard sections to secure operational stability

- LiDAR
- High-resolution 3D digital LiDAR to measure objects and distances and digitize shapes
- 64 CH
- Range : 50~200
- FOV : 180deg / Vertical : 45deg
- IP69, IP69K
- Front Camera
- High-performance front obstacle recognition (vehicles, pedestrians, infrastructure, etc.) and lane cognitive assistance
- FOV : 60deg
- FFrame Rate : 60FPS
- FPixels : 1920 x 1080

- AGX Orin 64GB
- Ambedded autonomous driving perception/control system
- CPU : 12‑core Arm® Cortex®‑A78AE
- GPU : 2048‑core Ampere, with 64 Tensor

- RADAR
- Utilizes detailed attribute information of 40 objects in the forward direction through a short-range radar system
- Vertical FOV : 45deg
- Range : 60-150 m
- Frequency Band : 76-77GHz

- GPS
- Precise positioning of CAYTsbased on signals received from GPS satellites (GNSS INS)
- Horizontal Position Accuracy : Standalon/SBAS/DGPS : 1.2/0.6/0.4 m
- RTK-INS : 0.6cm + 0.5ppm
- Heading Accuracy (Dual Antenna) : 0.3deg/1.5deg (w/o RTK, w/ RTK

- Industrial PC (NUVO-9160GC)
- GPU computing edge AI platform for the autonomous driving system’s perception, decision making, and control operations (installed with RTX-3050 8GB)
- MLS-STD-810G
- Vibration Prevention Kit
- Pixels : HDMI(HD)
- 25°C~60°C, 1Grms vibration absorption
- USS
- Detectionof objects in close proximity to the vehicle to ensure a safe distance during driving and stopping
- 12 Sensor 1 ECU
- Range 0.15 – 5.5 m
- Frequency Band : 43~60 Hz

- AVM (Around View Monitor)
- Precise in-lane driving using cameras installed on all sides of the vehicle and their corresponding images
- FOV : 360deg
- Frame Rate : 30FPS
- Pixels : HDMI(HD)
Advantages & Features
- AVM for heavy vehicles
-
- AVM sensor calibration for large vehicles to accurately detect stop lines, parking lanes, and driving lanes

- Operation of an HD MAP-based autonomous driving system
-
- The location of the vehicle is continuously displayed using high-precision GPS (tracking)
- The current location is displayed more precisely even in the port, where GPS may not reach some spots, by matching/analyzing the data collected from the high-performance sensors to the HD MAP information and utilizing a location information correction algorithm

- Enhanced safety through multiple sensor fusion systems
-
- Establishment of a sensor system and recognition technology that minimizes blind spots in complex yard sections to prevent accidents that may occur during the driving of cargo transport equipment and to secure safety
Release note
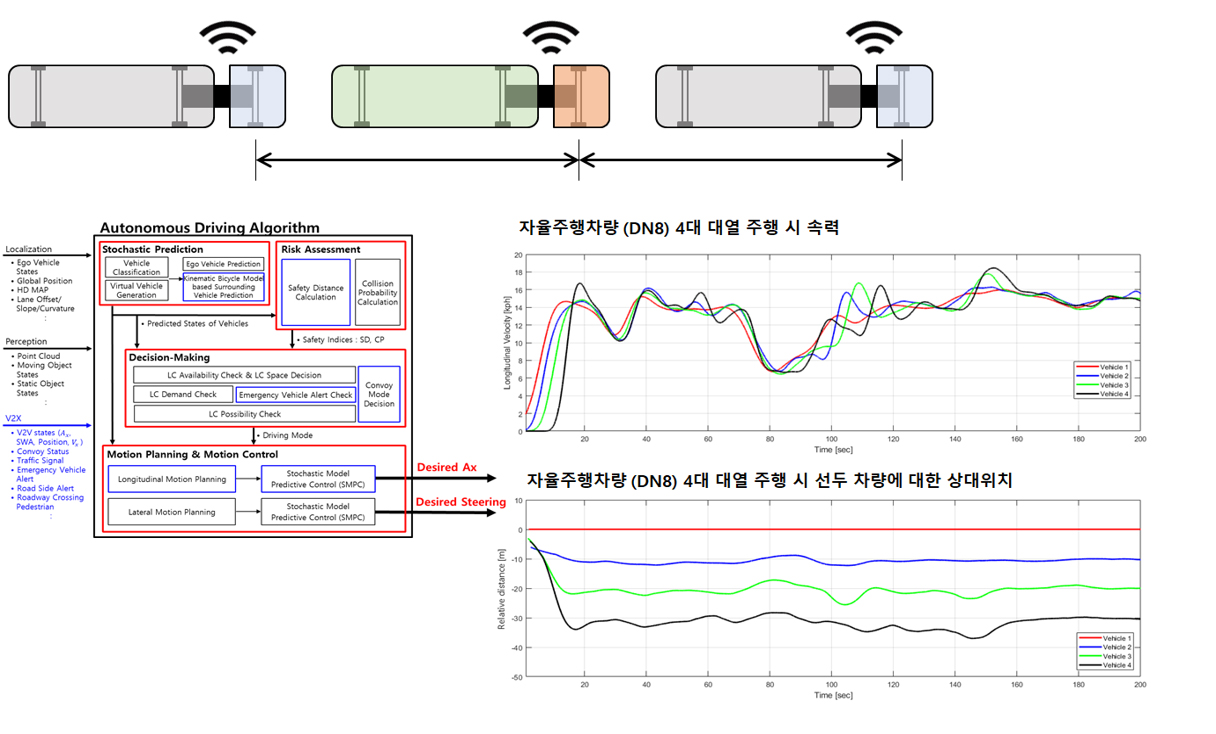
Autonomous Driving Truck Control Algorithm
Overview
- Responsible Institute:

- Development of a control algorithm that reflects the dynamic characteristics of port/yard trucks to implement precise driving of CAYTs
- Control commands delivered to the vehicle after analyzing the information collected through the 'sensor system' and 'V2X infrastructure.'
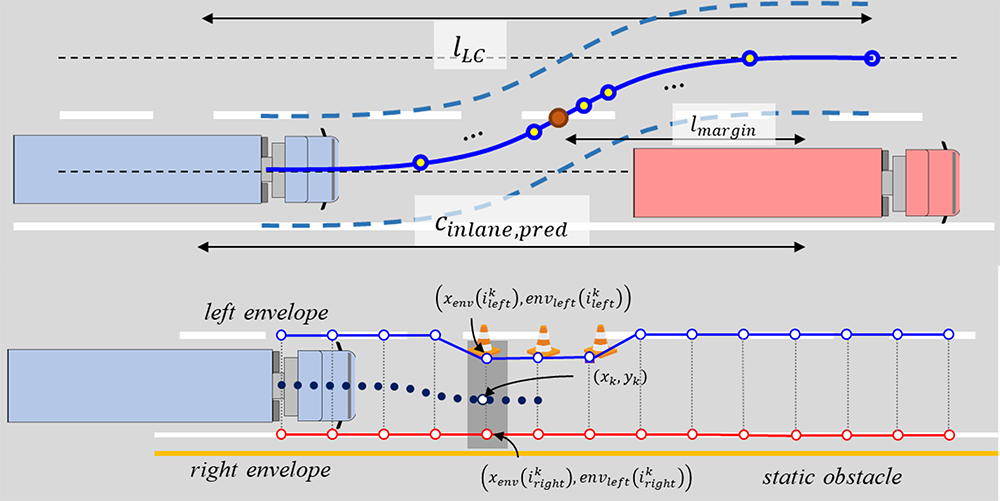
- Judgment and control algorithm that reflects the driving characteristics of the port
-
- Port-specific driving control algorithm that reflects the curvature along the work path and the turning radius due to the trailer's behavior
- Driving judgment algorithm that can respond to obstacles when entering/changing lanes and to parked vehicles on the roadside that may occur in port operations
- Infrastructure-linked driving algorithm
-
- Algorithm for creating routes and reaching working positions reflecting destinations and stopovers through infrastructure linkage
- Precise positioning and parking algorithm utilizing infrastructure linkage (CPS)
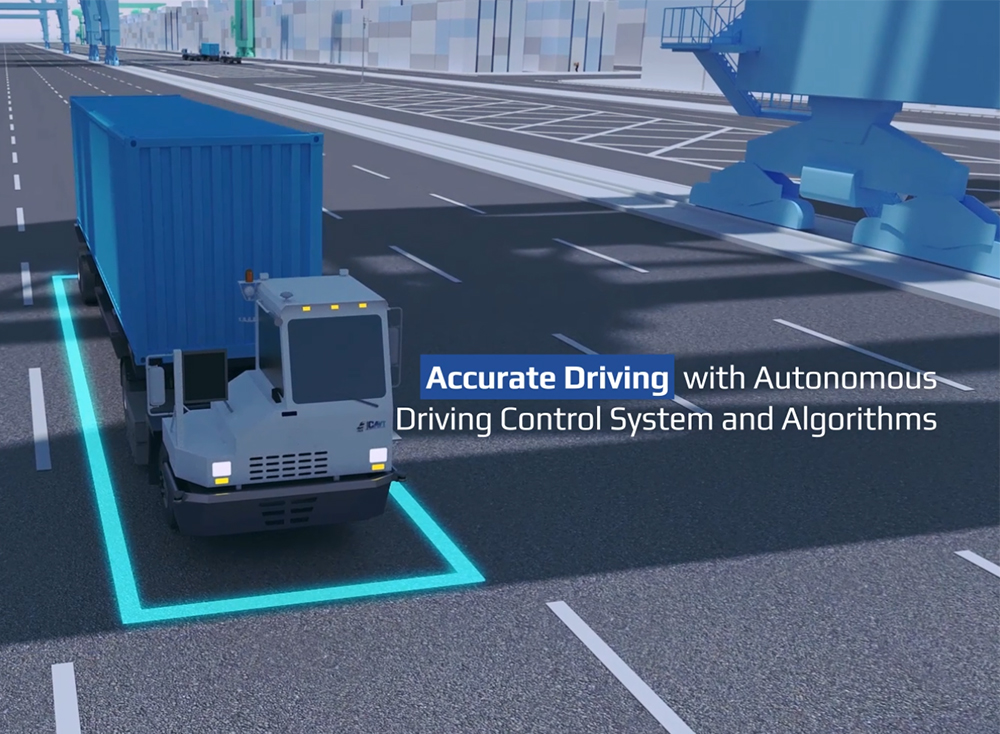
Advantages & Features
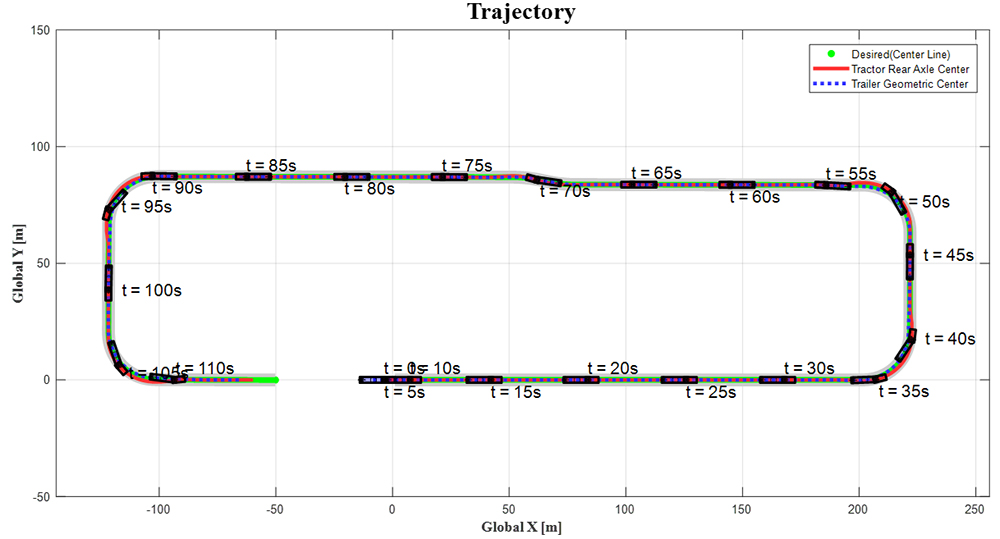
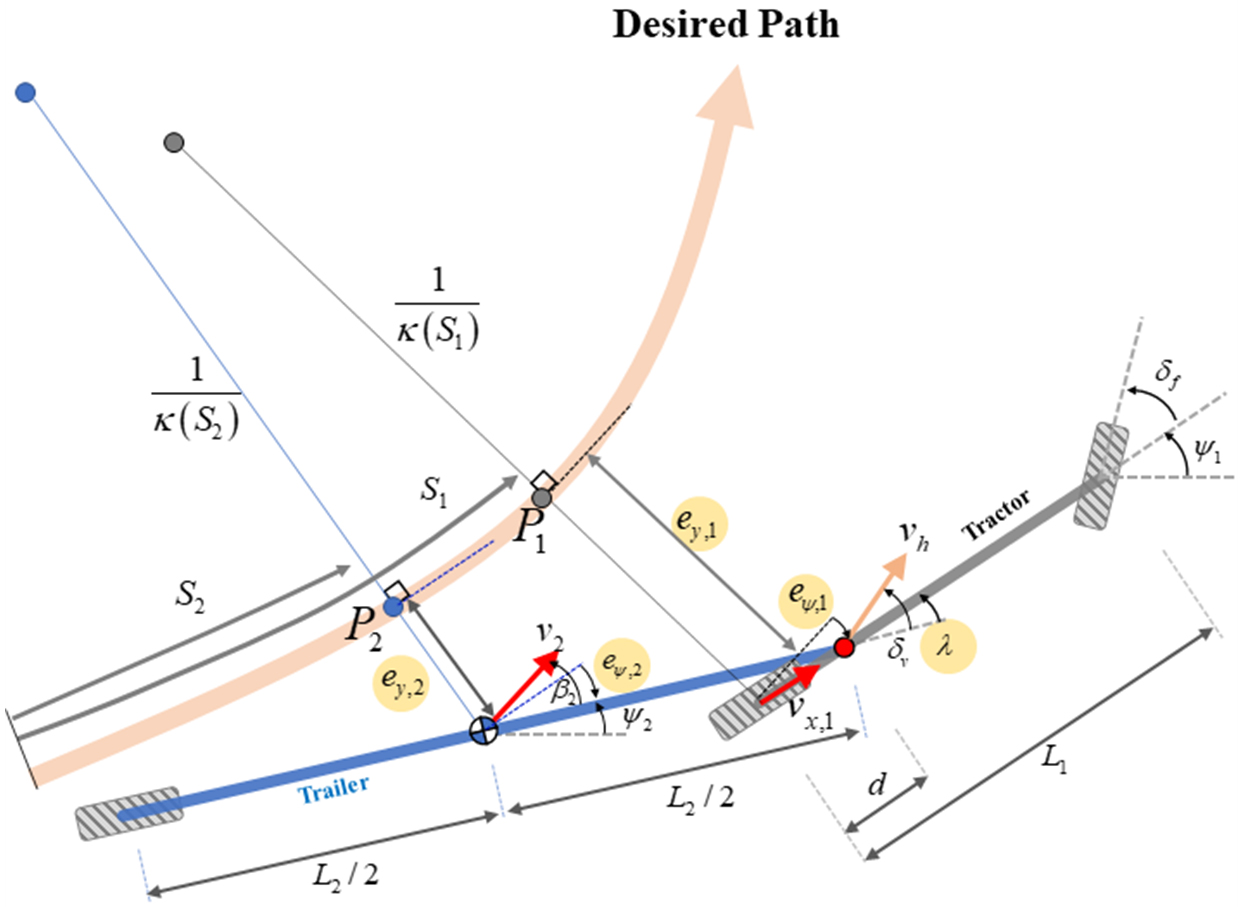
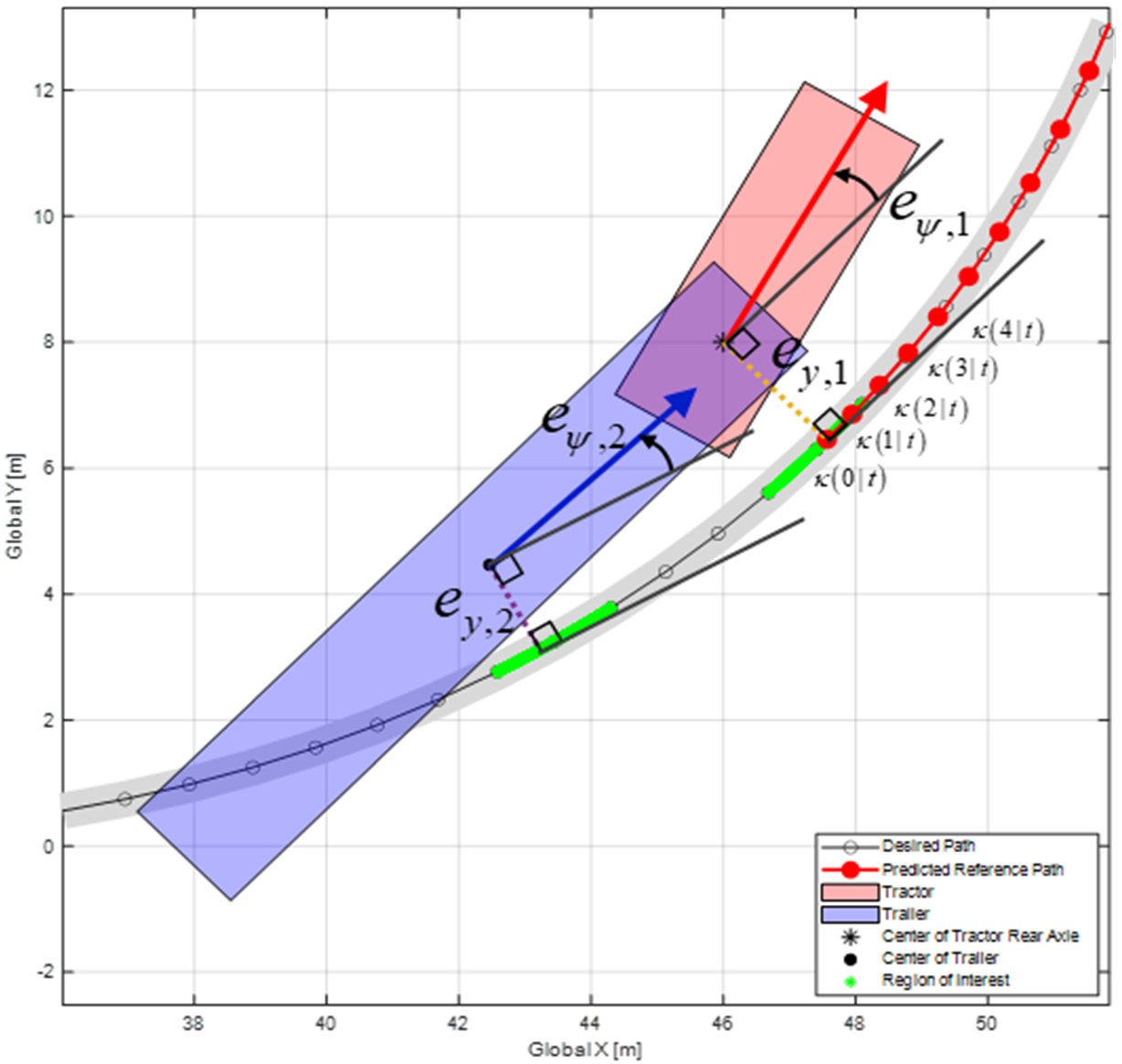
- 01 Accurate Path Followingof Yard Truck-Trailers
-
- Development of a truck-trailer model reflectingthe CAYT’s dynamic characteristics, (e.g., lateral error/angle error/hitch angle) for accurate and safe lane following along the designated path
- Simulated validation of the path-following algorithm using a model that reflects the characteristics of a yard truck
- 02 Control algorithm tailored to the working and driving conditions
-
- Control algorithm that reflects driving scenarios and the characteristics of the port such as ‘keeping lanes, changing lanes, lane placement, passing intersections’ and 'stopping precisely at the destination.’
- Stability secured by introducing algorithms proven in general autonomous vehicles to ports
- 03Forward/Side/Rear perception processing (radar, LiDAR, camera) algorithm
-
- Algorithm for recognizing/processing information coming through the sensor systems of the CAYT and smart CCTV the delivers commands(such as avoidance commands) by precisely recognizing stopped/fixed obstacles, pedestrians, moving equipment, etc.
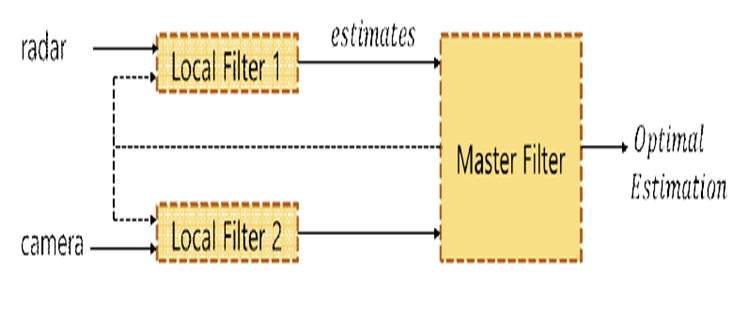
Conceptual image of the camera-radar fusion perception algorithm
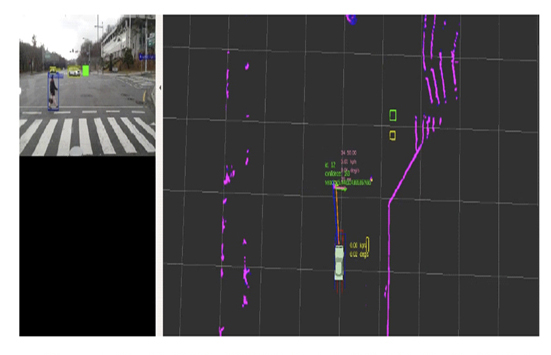
Operation screen of the LiDARrecognized objectcorrection algorithm utilizing camera-radar easy object perception
Release note
V2X Digital Infrastructure
Overview
- Responsible Institute :

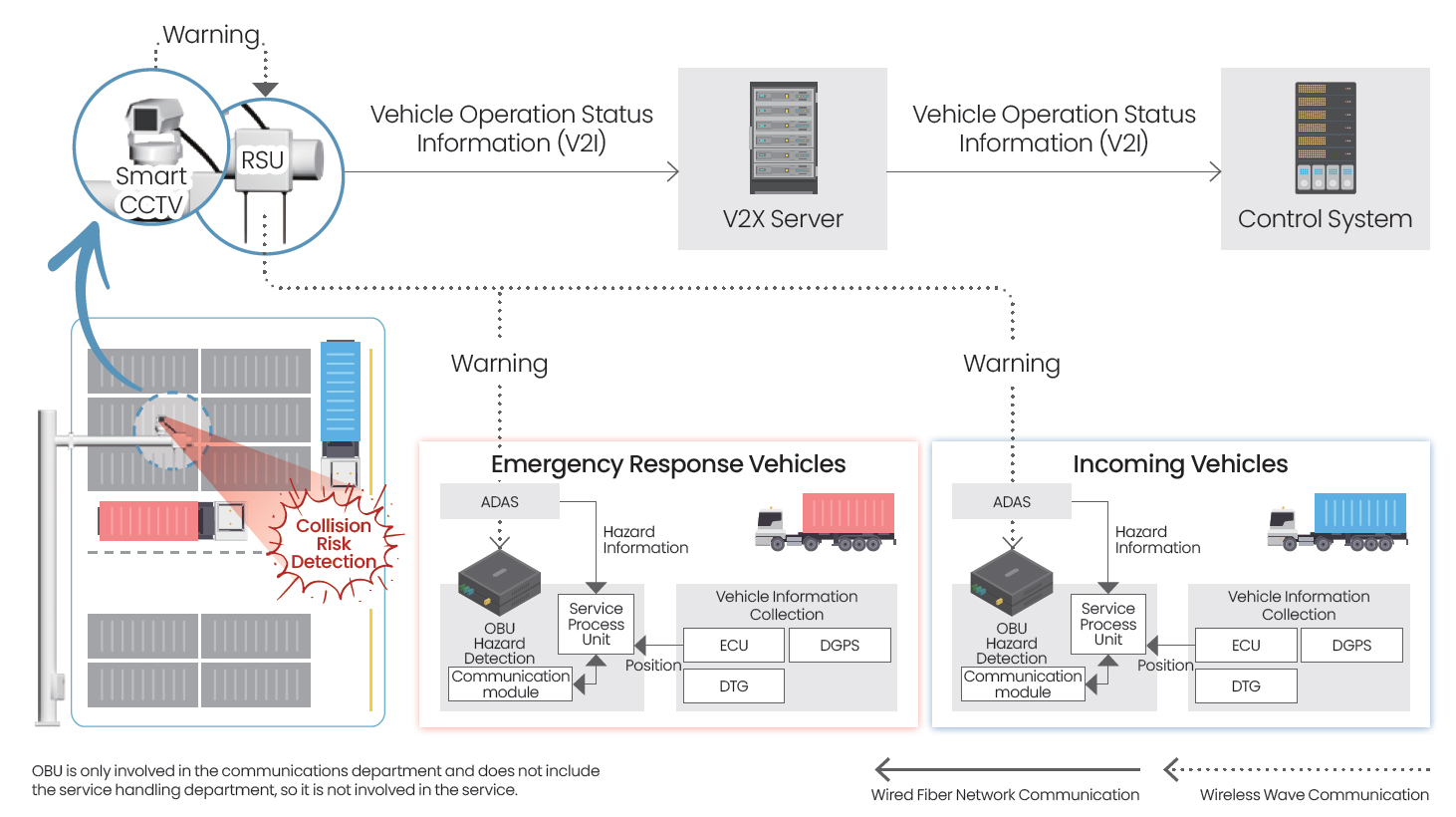
- Digital infrastructure to support the safe operation of CAYTs(vehicle-to-everything(V2X), smart CCTV, etc.)
- Dedicated network for autonomous driving: Designed by prioritizing WAVE-based V2X technology
- Deep learning-based image analysis technology used to gather and analyze various information from intersections, and provide this data to on-site systems
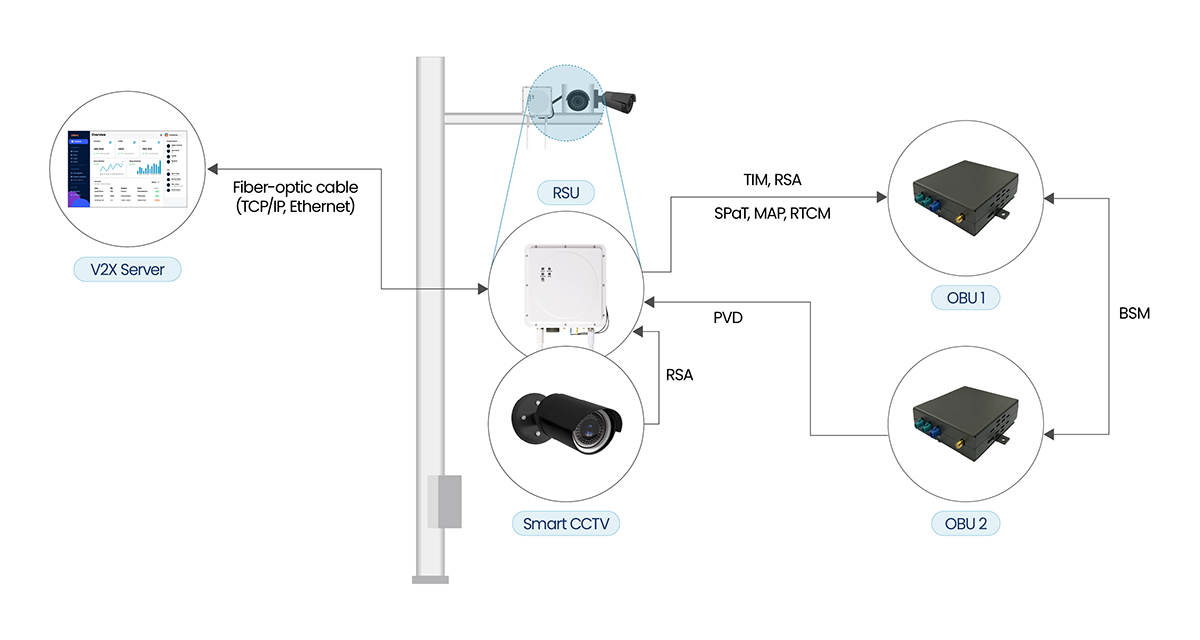
- PVD
- Probe vehicle data
- TIM
- Traveler information message
- RTCM
- Real-time precise positioning correction message
- BSM
- Basic safety message
- RSA
- Road threat warning message
- MAP
- Map data message
- Roadside station (RSU)
-
- Communication repeater fixed at an intersection that connects the CAYT's OBU with the V2X server
- Appropriate vehicle data for the required service received through the OBU is processed through the V2X server and transmitted to other vehicles nearby

- Vehicle terminal (OBU) (OBU)
-
- Autonomous driving communication equipment installed in the CAYT
- Vehicle↔vehicle and vehicle↔roadside station (RSU) communication of vehicle information data such as vehicle speed, location information, and direction
- Communicates with the vehicle and RSU using the WAVE communication standard

- V2X Server
-
- Stores information transmitted from the roadside station (RSU) and smart CCTV and transmits it to the control system or acts as an interface when exchanging information
- Core function server of the V2X infrastructure section, which manages all information and activities of the V2X infrastructure section
- Performs the intermediary role of receiving various instruction messages from the control system, converting them into V2X messages, transmitting them to the RSU, and transmitting the CAYT information to the control system

- Smart CCTV
-
- Collects and monitors real-time traffic information and accident information using AI-based algorithms
- Status information is transmitted to the V2X server via the RSU
- Detects objects even in various conditions such as bad weather (snow, rain), concealed structures, and changing time (day, night)
Advantages & Features
- 01 Identifies congestion to reduce congestion and prevent accidents
-
- Reduces congestion by transmitting congestion situation information to the control system through deep learning-based object analysis using the artificial intelligence of the smart CCTV
- In the event of dangerous situations such as a possible collision (vehicle-vehicle, vehicle-worker) at an intersection, information is communicated to the vehicle terminal (OBU) to prevent accidents
- 02 Warning and Assistance Services
-
- Collects real-time information on unexpected events such as accidents, breakdowns, and possible obstacles, as well as stops and rapid decelerations, and transmits warning messages to nearby CAYTs and the control systems.
- Provides driving information of maintenance and emergency vehicles to control systems and surrounding vehicles to prioritize their movements
- Defines the new V2X standard message set in the port
Release note
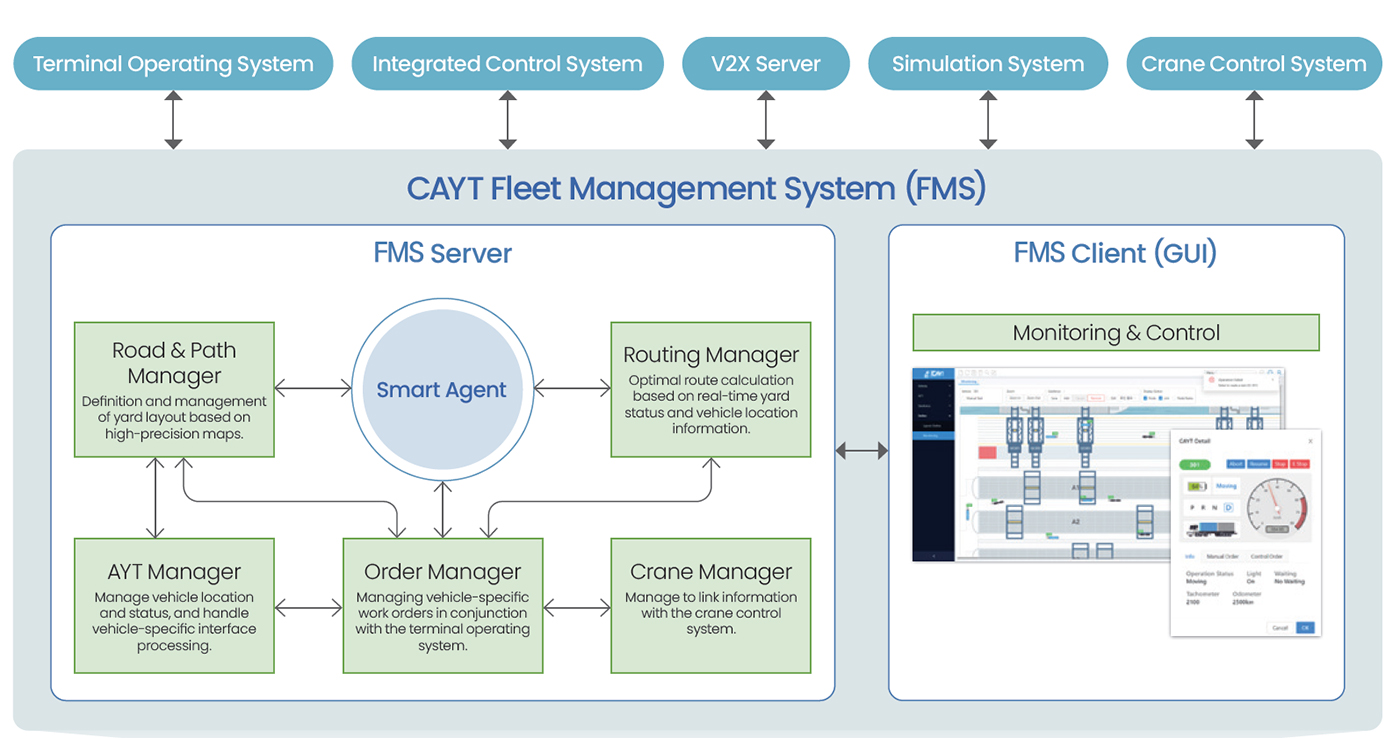
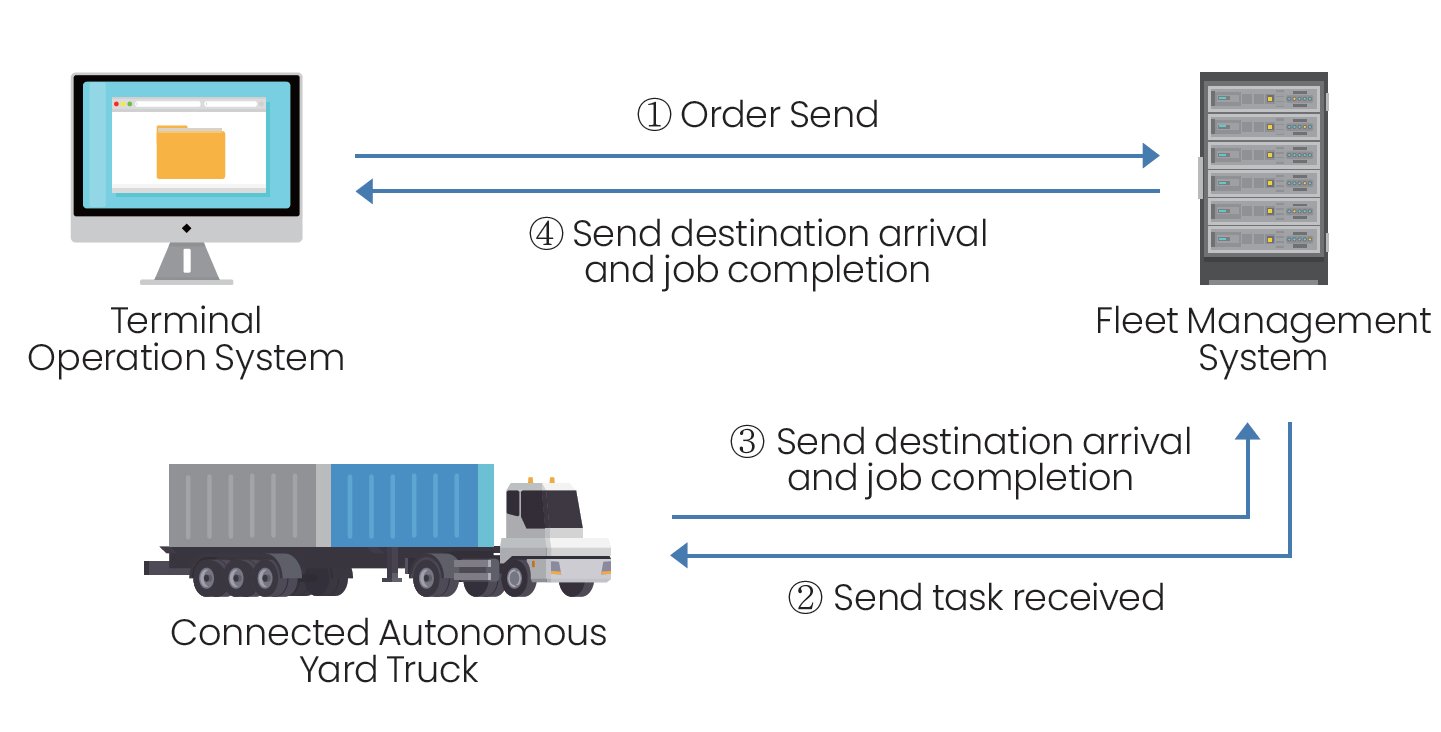
CAYT Fleet Management System
Overview
- Responsible Institute :

- An 'operation control system' that supports and manages ‘CAYTs’ for optimal driving by integrating with *various systems
(*terminal operation system (TOS), integrated control system, simulation system, etc.)
- 01 Job process management
-
- Setting the optimal sequence of operations based on priority and delivering real-time commands to CAYTs
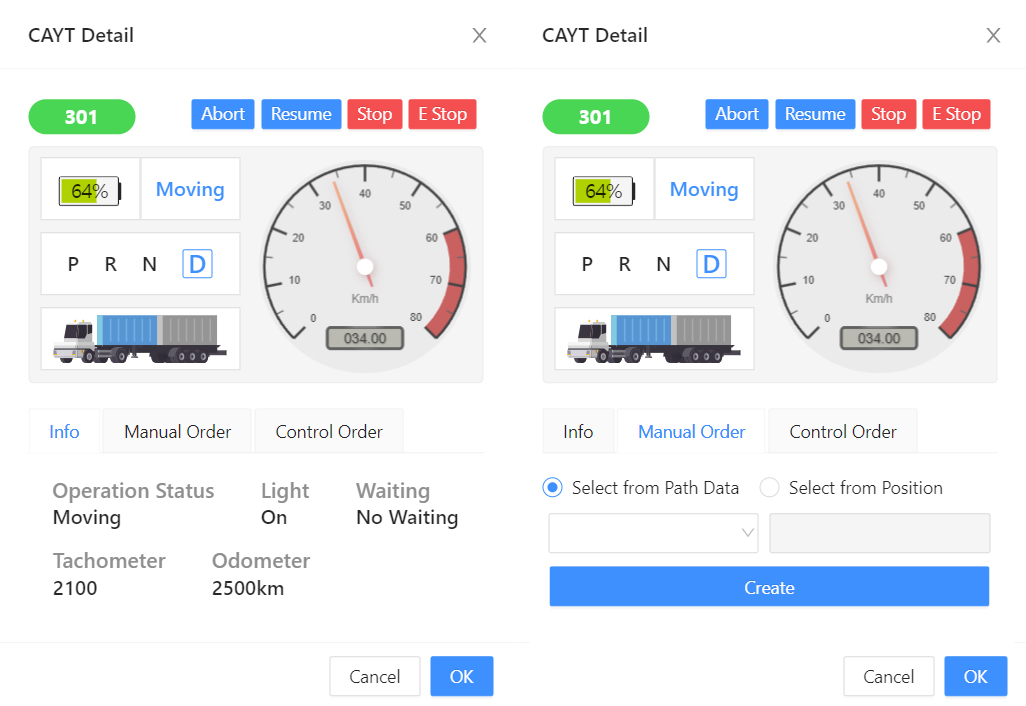
- 02 CAYT Status Management
-
- Monitorsthe operational status, vehicle status, remaining batteries, etc., of the CAYTs
- Manual control of CAYT work situations (resume operation, stop, emergency stop, move forward/backward)
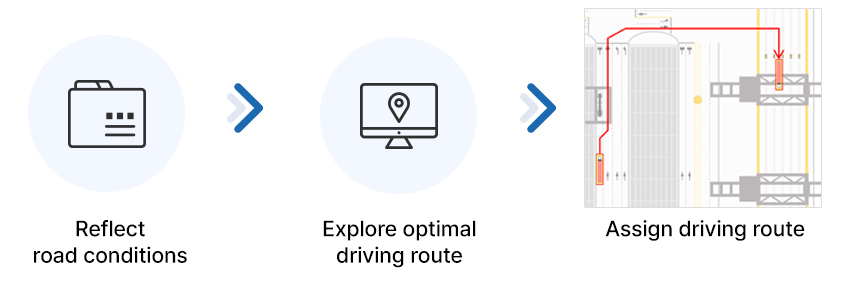
- 03Exploration of Optimal Driving Routes
-
- Assigns optimal driving routes that take into account the locations and the destinations of the container cargo
- Receives real-time road condition information such as access restricted areas/obstacles/traffic congestion from sensors installed in various infrastructure facilities and CAYTs, and reflects the information to optimize operation
- 04 TOS Linkage
-
- Manages cargo operations in coordination with the terminal operating system (TOS)
- 05 Linkage with Port Facilities linkage (Equipment, Infrastructure, etc.)
-
- Coordinates precise positioning and parking of CAYTs by integrating them with large-scale handling equipment such as berth/quay cranes and yard cranes (GPS, CPS)
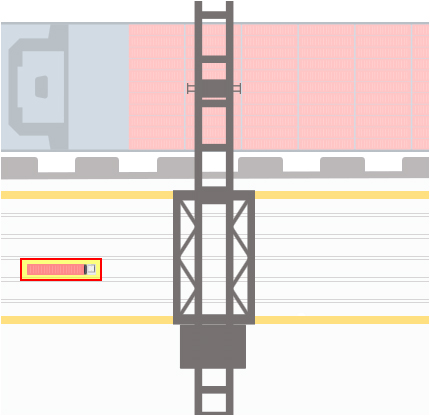
1. Arrives approximately 15m ahead based on the Bitt ID and offset
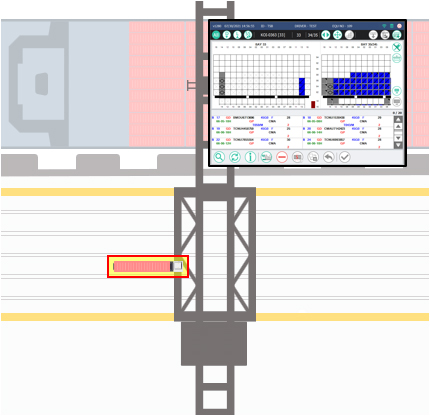
2. After arriving at the QC, moves closer based on the QC GPS location information
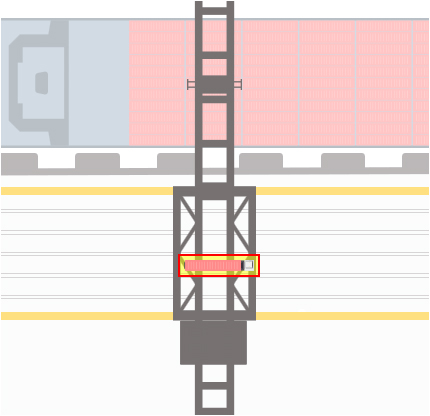
3. Proceeds with loading and unloading after stopping at the correct location based on QC GPS information
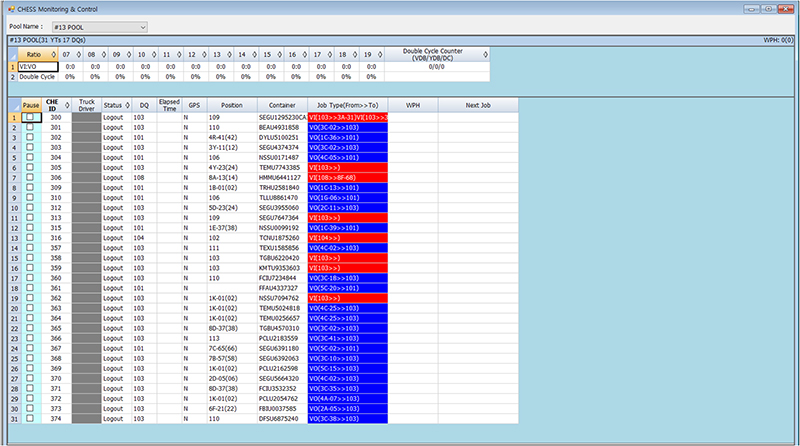
- 06 Operation Monitoring (Operation Control)
-
- Simultaneous control of over 100 CAYTs with real-time location and route display
- Function provided to label areas where dangerous event haveoccurred as restricted access areas or low-speed areas
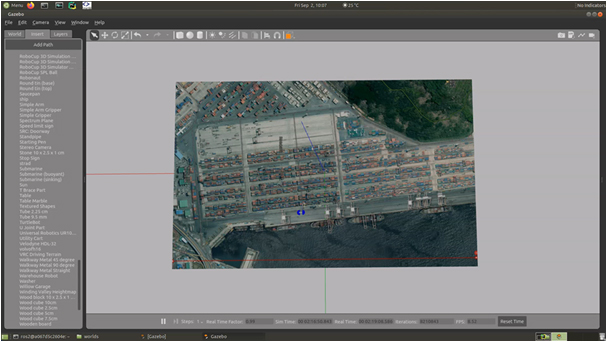
- 07Control System Linkage Simulation
-
- Development of simulation technology that simulates CAYT behavior when approximately 100 CAYTs are operating simultaneously
- Used for proactive performance validation
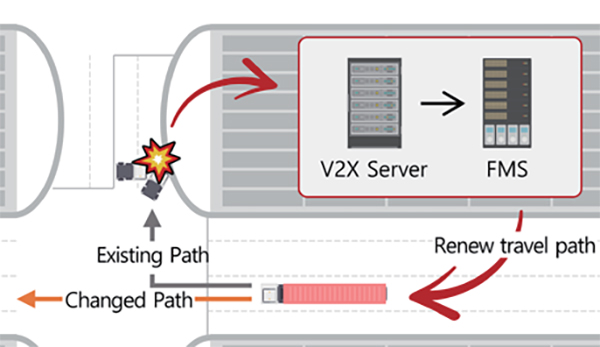
- 08 Exception handling
-
- Real-timehigh-speeddecision-making realized through AI big data analysis considering traffic flow in the event of emergencies/road obstacles(re-exploration of the travel path)
Advantages & Features
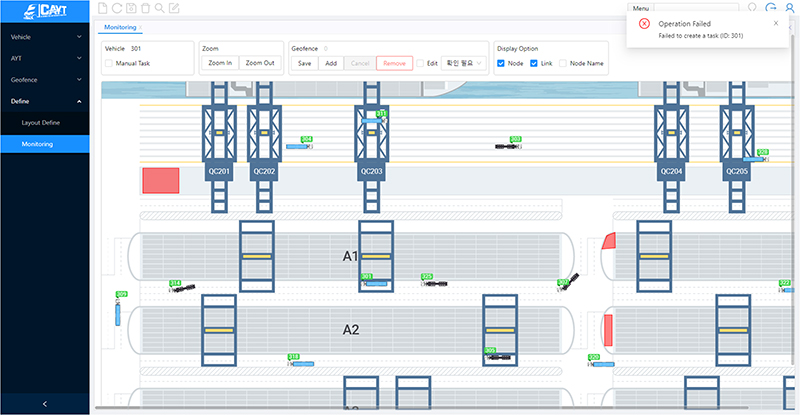
- Integrated monitoring
-
- Integrated monitoring of real-time yard situations such as possible CAYT travel routes and geofence areas based on the terminal yard map, and real-time monitoring of more than 100 CAYT vehicles
- TOS-linked work orders and status management, real-time location and status of individual vehicles, and task progress management
- Provides a KPI inquiry function based on real-time indicators of CAYT/work status and job history data
- Detects any abnormal situation and sends a warning message when a CAYT deviates from the commanded path or stops for a certain period of time using the real-time location information of the CAYT
- Workflow and task management
-
- Workflow management by terminal operation type allowing flexible management of CAYT movement and procedures in accordance with terminal operation policies
- Management of information such as berthing status and location, entry/exit routes near quay wall areas, pinning stations, standby sections, etc., in coordination with the TOS
- Work preparation for CAYT operation, support for charging and parking processes, support for operation mode management and manual control in unexpected situations
- Terminal information and route management
-
- Provides equipment information on terminal facilities, cranes, etc., and management functions such as parking position, charging stations, and travel routes to easily respond to facility and equipment changes
- Exploration of optimal route using LDM based on real-time information collected from CAYT and infrastructure (reflecting congestion area and restricted driving area)
- Determination of the entry/exit point from the driving lane to the working lane in consideration of the work order and standby vehicles.
- Standard interface
-
- Universally applicable system with a TIC 4.0 standard interface to interface with the terminal operating systems of various suppliers
- Provides a standard API for interfacing various autonomous vehicles and control systems
- Improved cargo transport efficiency
-
- Optimizes CAYT operation and improves operation efficiency by collecting the location and status of CAYTs, collecting real-time work progress status, and providing an optimal routes to minimize deadlocks and possible collisions
- Supports various operation tests in accordance with vehicle operation policies through simulation in coordination with the TOS
- Mobile services for on-site workers
-
- Provides functions to register or cancel restricted driving zones in the case of encountering dangerous areas during field patrols
- On-site workers can update the status of parking lot and charging stations(occupied, empty, etc.) when the information linkage is not available due to the absence of automation equipment.
- Information input when the pinning station worker finishes attaching/detaching the lasing cone
Release note